Professionals who maintain motors need to be able to answer the following questions. How can an instrument 100 to 1,000 feet or more away from the motor provide information about the condition of the rotor? What is going on within the motor to produce the peaks and ripples that we see with our instruments? What defines the frequencies of the peaks and causes the amplitude to increase as the rotor bars break? And finally, how do we interpret those signals to make proactive decisions about motor repair scheduling?
In this article we will present the following:
• A conceptual explanation of rotor construction and operation
• An explanation of the effect of a broken rotor bar on this operation
• A review of several techniques for rotor condition analysis
• An explanation of the calculations and where to find the faults
frequencies in the spectrum
Maintenance Professional’s Challenge with Rotor Bar Analysis
There are several challenges when trying to analyze rotor health with vibration analysis. It is necessary to know the number of rotor bars to identify the frequency of interest in the vibration spectrum. This knowledge is often difficult to obtain without disassembly of the motor. Incipient rotor bar problems in some motors will not contribute significantly to overall vibration. Even though the effect on torque and current is evident, the contribution to vibration is not large enough to be definitive. Contributions to 2x Line frequency and 2x and 4x running speed can be difficult to distinguish, especially in 2-pole motors. The 2x line frequency can have contributions from eccentricity, rotor bar issues, as well as voltage and current imbalance. Distinguishing which forcing frequency is responsible for the amplitude increase at this frequency can be nearly impossible with vibration analysis alone. The analysis methods described in this article will alleviate questionable readings and unclear diagnostics from vibration data.
Rotor Construction & Operation
In its simplest form a three-phase induction motor is comprised of a stator and a rotor. The purpose of the stator is to develop the rotating magnetic field. The stator field induces a voltage into the rotor cage. The rotor cage is made up of parallel conductors shorted together on each end by a shorting ring. This shorting ring is used to complete the circuit and allow current to flow through the rotor bars. Current flow through the rotor bars develops the rotor field. The field of the stator and the generated field in the rotor interact to produce torque.

At startup, the rotor is stationary and the difference in speed between the rotating field and the rotor bars is at its maximum or what is identified as “slip”. Slip is defined by the equation:

As the torque is produced, the rotor begins to speed up. The difference in speed is reduced as the rotor speed approaches synchronous speed. In fact, the relative motion between the rotor and stator of an operating motor can vary from 1 to approximately 200 RPM, and from no load to full load respectively. These RPM values vary widely from motor design to design.

As the difference in speed between the rotor and the stator begins to decrease, the voltage generated in the rotor is reduced. The resultant current flow will be reduced to some steady state value that is required to maintain steady state torque. During steady state operation of the motor, the torque generated by the motor is equal to the torque being demanded by the load. Changes in load will affect the speed.
For a load increase, the torque demand of the load becomes greater than the torque being supplied by the rotor. This causes the rotor speed to slow and therefore, slip will increase.
Torque will continue to increase at a slower and slower rate until the torque of the rotor is again equal to the torque of the load. As the rotor current increases this causes the stator current to increase during the transient condition until the stator current levels out at its new higher steady state value.
It is important to understand that the motor is, essentially, a transformer with a rotating secondary. As the simplified circuit drawing (Figure 4) illustrates, any current consumed in the rotor will be seen as a load on the primary side of the circuit, which is the stator winding.

With this load current relationship of primary to secondary current, any changes in the rotor current will also be present in the stator current. By monitoring the stator current the effects from the rotor imbedded in the stator signals is seen. Industry software applies the complex algorithms necessary to make these signals more meaningful for analysis.
Before understanding how rotor bar analysis works, it is important to understand how the rotor works with the stator, and the effect a broken rotor bar has on the system. In this explanation some very complex interactions will be generalized to allow for conceptual understanding.
Consider a two-pole motor operating at 60Hz and at some steady state load condition. The field developed in the stator will make one revolution every 1/60th of a second (3600RPM). The rotor is rotating at a speed slightly slower than the synchronous field. Let’s say it is rotating at 3590RPM and makes one complete revolution every 1/59.83 of a second. This means that the rotor will slip behind the stator field by one degree for every revolution of the stator field, as seen in Figure 5.

Think of two race cars on a circle track. How many laps does it take for the faster car driven by Steven Synchronous (Stator Field) to over take the slower car driven by Larry Lagging (Rotor)? Well, t will take the Steven Synchronous 360 laps or revolutions to overtake Larry Lagging. It will take the synchronous field six seconds to lap the slower rotor. During this overtake process the point on the rotor will pass under the south and the north magnetic pole, represented by the dashed lines at 6 and 12 o’clock respectively. The calculation of the pulsation frequency associated with bar passing under the poles is:

In our example, slip is (3600-3590)/3600 and equals .00278. The frequency of any given point passing the poles would be 60Hz x (1- 2(.00278)) or 59.667Hz.
The Rotor Bar Effect on the Lower Sideband Amplitude
When a broken bar is present within the rotor, current cannot flow through it, and therefore, it can no longer add its share of torque to the rotors load burden. As the broken bar passes under the pole it will effectively reduce the torque of the rotor for the period of time it is under the field pole, in its torque producing position. Since the torque of the rotor is reduced slip is again introduced. As the rotor slows and the slip is increased, the voltage induced into the rotor is also increased, and therefore, the current in the good rotor bars will have to increase to produce the needed torque. This continues until the torque of the motor is restored to equal the torque of the load. When the broken bar is in a position where its contribution is not relied upon (traveling parallel to the lines of flux), the torque of the motor will go up and the opposite effect will be true. The beating frequency at which this occurs is defined in the equation in Figure 6. This analysis method is referred to in several ways - lower side band analysis, pole pass frequency sideband analysis, rotor bar signature analysis, as well as a few others. Regardless of the name, the current spectrum surrounding the fundamental frequency is closely examined (see Figure 7) for the relative amplitude difference between the fundamental and what is referred to as the rotor bar sideband frequency (Frotorbar). The amplitude increase at the Frotorbar is due to the added current drawn in the rotor and also from the stator as the good bars attempt to make up for the one defective bar. As the amplitude increases at the rotor sideband frequency, the amplitude difference between the fundamental frequency, and the rotor bar frequency will go down. As the rotor bars break, and the health of the rotor continues to decline, this difference will also decline over time as the sideband frequency becomes more and more dominant in the signal.

Torque Spectrum Analysis
The acquisition of torque ripple and the analysis of the torque spectrum is a relatively new addition in the realm of condition based maintenance technology. By capturing the real components of the current and deriving the flux generated from voltage, a signal equal to air gap torque is developed. Mechanical information buried in a complex modulated current signal can now be easily accessed and interpreted for electrical and mechanical conditions. Mechanical conditions such as faulty bearings, pump cavitations, loose fan belts and even oil whirl have been successfully diagnosed with torque spectrum analysis. Analyzing the torque spectrum is also an effective tool for analyzing rotor bar health. In fact, there are four frequencies of interest that can be used in this regard. Since the torque spectrum is not electrically modulated like the current spectrum, it is not necessary to perform sideband analysis around the fundamental frequency. Instead, the spectrum is analyzed in the same way as a vibration spectrum. Look for frequencies that naturally occur due to the forces that generate them. This is much more intuitive and natural than current spectrum analysis.
The frequencies of interest are:
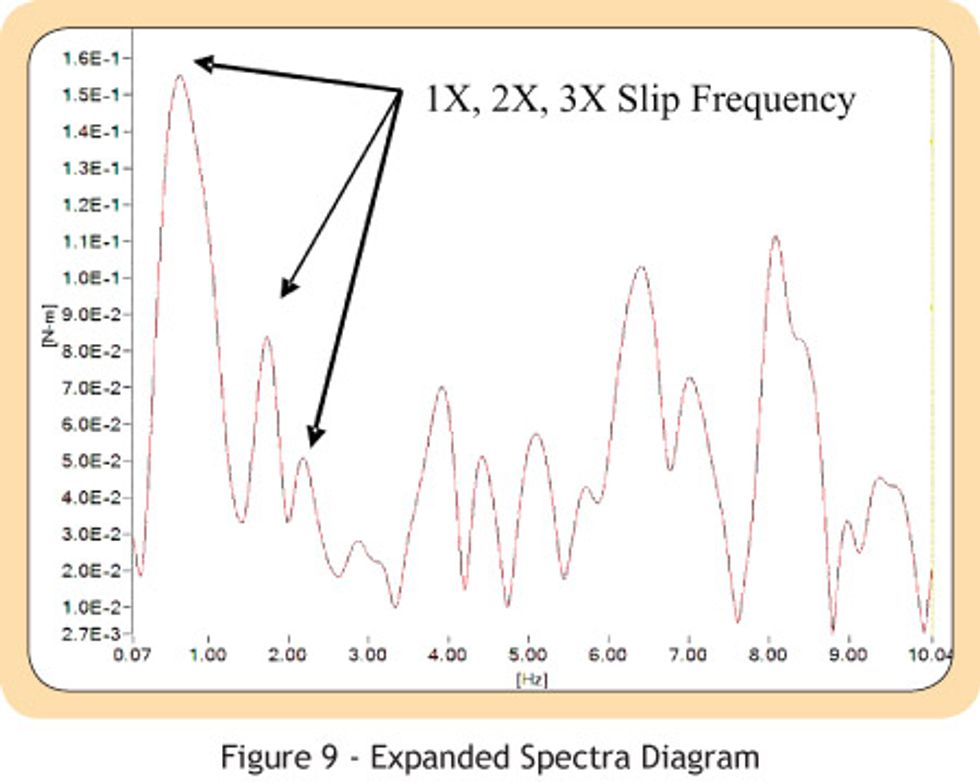
1. Slip Frequency – The difference between synchronous and rotor speed.
2. Rotational Frequency – The speed of the rotor.
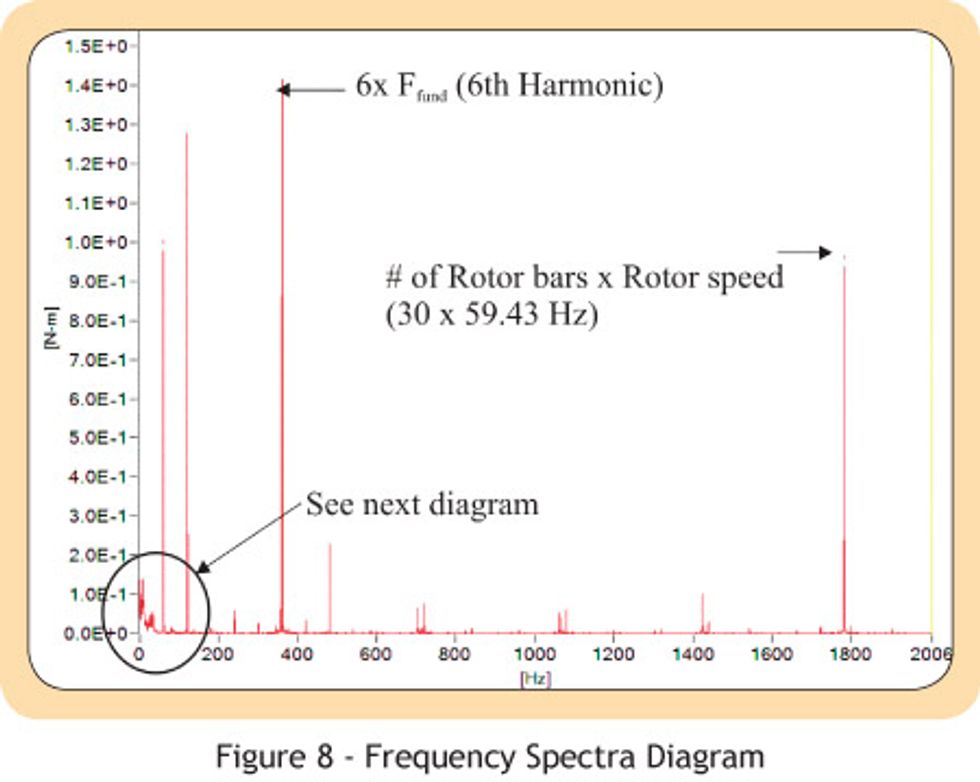
3. 6x Fundamental Frequency – The 6th harmonic of the fundamental.
4. Rotor Bar Passing Frequency – The # of rotor bars x Rotational
Frequency
Each of these frequencies is identified in the spectra shown in Figures 8 and 9.

Torque Spectrum
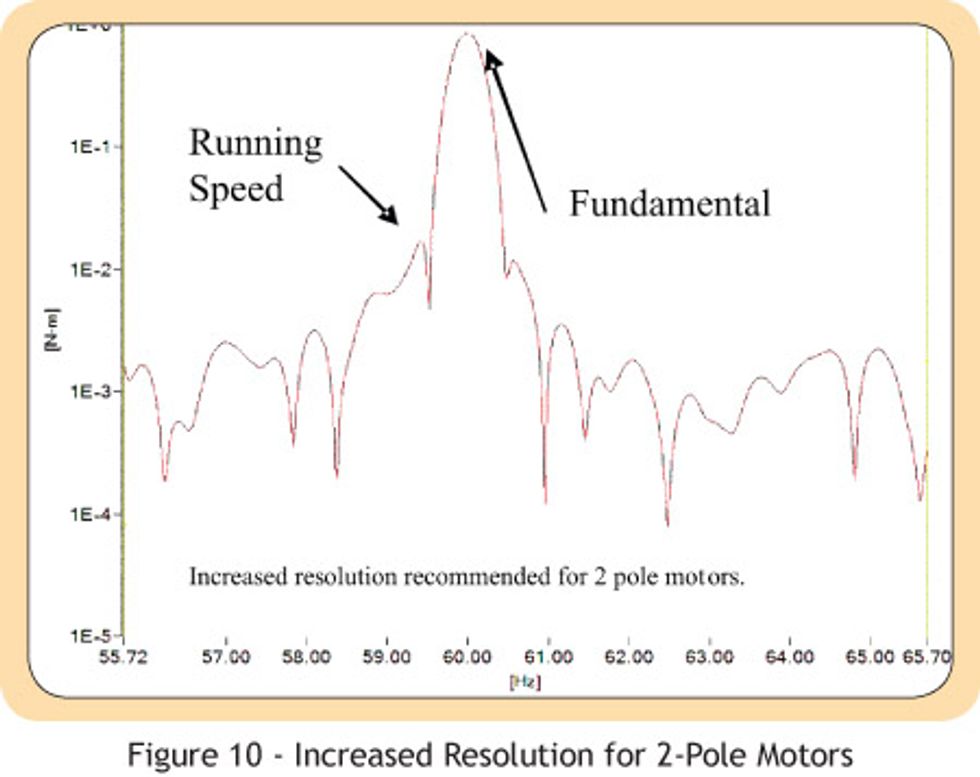
A Torque Spectrum Showing Slip Frequency Peak and Two Multiples is shown in Figure 10. The running speed peak for a two pole motor is very close to the fundamental frequency. For this reason increased load and/or increased spectral resolution is required for an accurate analysis (see Figure 10).

Spectrum Analysis of Individual Phase Currents
Analysis of the phase current in the spectrum domain reveals additional peaks of interest apart from the sideband frequencies discussed earlier. Because there is a natural 6x turning speed peak in the torque, there will be a 5th and 7th harmonics present in the current spectrum. This offset from the 6th harmonic is due to the natural modulation in the current signal. The presence of significant 5th and 7th harmonics, coupled with pole pass frequency sidebands, will indicate the presence of a rotor bar defect as shown in Figure 11. The data imbedded in the modulation signals surrounding the fundamental is valuable, but can be difficult to analyze. Demodulation of the current is a complex method that can be used to make these signals more meaningful. Unfortunately, the demodulation method is typically limited in how far away from the fundamental it can calculate.

Summing It All Up
Today many instruments incorporate the use of computer algorithms to automatically identify the frequency peaks of interest and the amplitudes of these peaks to aid in analysis. What appears to be a very challenging task becomes quite simple with the aid of industrial designed software. Of the various methods put forth in this article, no single test will definitively prove the presence of a rotor bar defect. Understanding why these peaks are where they are, and what is actually causing the increases in amplitude, allows us to better analyze the condition of our machines. The use of these methods will also provide additional clarity to the vibration data. Luckily, very few rotor bar defects lead to catastrophic motor failure. All of the data analysis methods described in this article have trendable indicators. Trend the relative amplitudes for motors, compare these results to other motors of the same design, and make a educated decision that is practical concerning motor criticality. The presence of broken bars will cause an increase in overall motor losses and a decrease in motor efficiency. The additional heat generated from the added current will also further increase the rate of insulation degradation in the stator. Taking routine data on your motors, analyzing that data as described above and trending this data over time will allow you the confidence to “make the right the call”.
Drew Norman is currently working with Baker Instrument Company, an SKF Group company performing product training in the US and Canada. He worked with General Electric for eight years in a variety of roles including predictive maintenance technician, motor generator specialist and shop operations manager at the Tucson Service Center. He has also worked in the pulp and paper industry as an Equipment Management Program Coordinator, as well as trained and served in the US Navy as a Journeyman Electrician and Nuclear Operator.