DO YOU USE THE WORD “CALIBRATE” PROPERLY?
Calibration is defined as an orderly procedure for determining sensitivity, which is the ratio between electrical output and mechanical input -- millivolts per g or millivolts per m/s2.
WHY MUST WE CALIBRATE?
Our accelerometers were calibrated where they were manufactured in order to determine their sensitivity. Later, we must recalibrate them because sensitivity can change (with ambient temperature, for example) and our readings would be wrong.
STATIC CALIBRATION
Part 1 discussed using the earth’s gravitational field for a 1g turnover or static check of wire strain gage, piezoresistive and variable capacitance accelerometers, which respond down to zero frequency. It should not be used for crystal or piezoelectric accelerometers since they do not respond down to zero frequency.

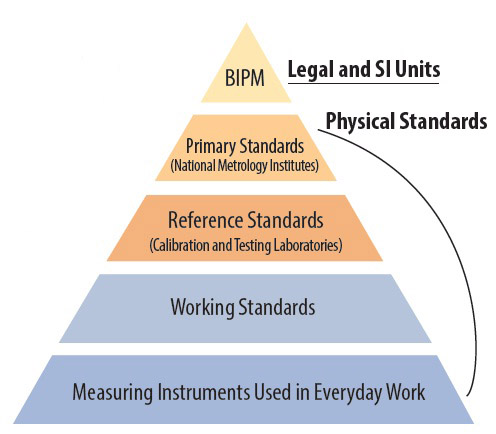
Figure 1: Calibration levels triangle
DYNAMIC CALIBRATION
In all calibration using sinusoidal motion (oscilloscope), be sure your shaker’s acceleration waveforms are sinusoidal. Otherwise, errors can result.
RELATIVELY CRUDE CHECKS
Consider the veescope shown in Figure 2. Place one on the armature of your shaker. Attach your accelerometer. “Eyeball” the wedge while adjusting shaker displacement (frequency previously set at 44.2 Hz) to peak-to-peak D=0.1 inch. Calculating A=0.0511f2D shows that you are shaking at A=10g. Alternately, use D=2.5 mm at 44.5 Hz and calculate A=0.00202f2D=10g.
Divide the electrical output (value) from your accelerometer/signal conditioner by 10 to get sensitivity in pC/g or mv/g.

Figure 2: A veescope
ABSOLUTE CALIBRATION
Rarely performed outside national standards laboratories, absolute calibration of an accelerometer is based upon the primary standards of mass, length and time. Sensor output is measured by a voltmeter that is also traceable to the National Institute of Standards and Technology (NIST) or other standardizing agency.
Time and frequency can be linked to a National Measurement Institute (NMI) in the form of broadcasted Coordinated Universal Time (UTC) signals linked to the Bureau International des Poids et Measures (BIPM) and International Atomic Time (TAI). The second is now defined as the duration of 9,192,631,770 cycles of cesium radiation.
In Figure 3, the laser interferometer measures D. Alternately, a calibrated reticle microscope could measure D. Source frequency f is monitored by a time-based instrument. The accuracy of D (length) and f (time) reference instruments should be traceable to international standards: f in hertz and D in inches or mm are used in either to calculate peak acceleration A in g units.
A = 0.0511f2D or A = 0.00202f2D
Finally, the accelerometer’s electrical output in millivolts is divided by acceleration in g to calculate sensitivity in mv/g.

Figure 3: Absolute calibration; not shown, an oscillator or digital signal source or the power amplifier powering the shaker
See the several methods in ISO Standard 16063-11 for details on techniques, uncertainties (as low as ± 0.4% at PTB and 0.3% at NIST) and limitations.
Should your calibrations be traceable to NIST or to another country’s standards lab? You might be interested in learning about the equipment used at the U.S.-based NIST. The federal technology agency uses the Endevco absolute calibration shaker + laser unit shown in Figure 4. Stroke D is 0.5 inch. Its beryllium armature is very stiff. Displacement is sensed by a helium-neon (HeNe) laser shining downward from above the shaker. The laser is supported by four square aluminum legs that rest upon the lab floor. The isolated shaker platform is separately supported by four dark colored steel legs. The shaker is said to have less than five percent transverse motion at all frequencies and less than two percent acceleration distortion.

Figure 4: Endevco’s Model 2916A absolute calibration shaker + laser
A similar German system is shown in Figure 5.

Figure 5: Absolute calibration shaker with laser (photo courtesy of Spektra USA)
SPECIALIZED SHAKERS
For machinery fault warning, the frequency range 10 to 10,000 Hz is adequate; 1-inch or 25 mm is more than enough stroke. Most important is purity of waveform, which should be routinely checked with an oscilloscope and spectrum analyzer.
Several manufacturers offer semi-automated accelerometer comparison calibration systems. Figures 6 and 7 show an air bearing calibration shaker said to feature minimum lateral motion. An adjustable amount of DC in the coil, rather than springs, axially positions the shaker armature.

Figure 6: Air bearing shaker (image courtesy of The Modal Shop)

Figure 7: Armature details (image courtesy of The Modal Shop)
COMPARISON CALIBRATION USING TWO METERS
Provided your reference or standard accelerometer has been precisely calibrated and you take care with your techniques and execution, your results can be very acceptable. Specialized electrodynamic (ED) shakers (examples in Figures 6 and 8) are usually employed. You may encounter difficulties at both very low and very high frequencies. It is important that both accelerometers experience the same mechanical input. An idealized back-to-back holding fixture (as in Figure 8) gives identical motion to the two accelerometers.
The best way to know the sensitivity of your reference or standard accelerometer is to have it calibrated by your country’s NMI. Turnaround time may be a problem, so own two standard or reference units, one in use and one in transit.

Figure 8: Electrodynamic calibrator
Alternately, send your standard or reference units to an accelerometer manufacturer or an independent calibration lab, which send their standard or reference units to your country’s NMI.
The frequencies at which you calibrate should match those used at the NMI or intermediate lab so you can certify your own traceability to your country’s NMI.
You could commence with two accelerometers connected back-to-back on a rigid fixture driven by an ED shaker so they experience identical accelerations as much as possible. One would be your “standard” or “reference” unit whose sensitivity Ss has been given to you (by NIST or another agency) and the other an “unknown” unit whose sensitivity Su you wish to determine to calibrate. Commence shaking and read accelerometer electrical outputs Es and Eu.
Does it seem logical to you that the two electrical signals, Eu and Es, would be directly proportional to the two sensor sensitivities, Su and Ss?
That is,

Read Es and Es off the two precise and expensive meters. You already know Ss. Calculate Su by cross-multiplying and dividing.
COMPARISON CALIBRATION, ONE METER
Instead of using two expensive meters, consider the ratio method shown in Figure 9. Here, potentiometer R divides whichever signal is larger so a selectable fraction can be compared with the smaller signal.

Figure 9: Comparison calibration by ratio method
Assuming that both amplifier gains are unity:
sensitivityunknown = R x sensitivitystandard.
Continually tap the meter, ensuring to avoid meter stiction, while adjusting R as you switch back-and-forth between the two accelerometer systems, seeking the same meter reading from both.
Figure 10 shows a way to save building a backto- back fixture. It is a standard or reference accelerometer (sometimes called a double-ended accelerometer) in which the sensing crystal is attached to the “roof” rather than the “floor,” as in most PE accelerometers. The roof is drilled and tapped to accommodate a stud directly holding the unknown accelerometer. Avoid any intermediate structure or adaptor.

Figure 10: Specialized calibration accelerometer (image courtesy of Dytran Instruments)
At extremely high frequencies (above 5,000 Hz), the published sensitivity Ss of the standard unit is accurately known only with a specific mass loading.
Avoid operating at or near shaker armature + load resonance. Some specialized shakers have their first fn > 50 kHz, but by the time we add all this load, the first fn must drop significantly.
Using some variation of Figure 9, we check sensitivity at perhaps 10 different frequencies over the frequency range in which we’ll use the unknown accelerometer. Keep the results as a table or plot.
Figure 11: Back-to-back calibration
Such a run is often repeated at other intensities to be sure the accelerometer is linear in order to verify that its sensitivity (in picocoulombs per g or in millivolts per g) does not change with intensity.
HIGH FREQUENCY CALIBRATION DIFFICULTIES
Above 5000 Hz, comparison calibration becomes rather difficult because the displacements are extremely small.

Figure 12: Comparison calibration
For example, if A=10g peak, at f=5000 Hz, D is a little less than 8 µinch or 0.2 µm. Since the displacements are extremely small, the reference and test accelerometers may not experience the same motion. As discussed in Part 1, surfaces must be clean and smooth and treated with a light film of oil before you carefully torque the hold-down studs. If in doubt that motions are identical, reverse the accelerometer’s physical positions without changing the electrical connections.
PORTABLE CALIBRATOR
On some jobs, it’s more convenient to perform calibrations in the field, rather than carry all sensors back to the lab (see Figure 13).

Figure 13: Portable accelerometer calibration lab
CONCLUSION
We have looked at several accelerometer types that currently are popular and their mechanical aspects. In this article, we focused on the calibration of these sensors and systems. For our next and final two articles, we will examine accelerometers attached to various machines so they can report on machinery health.
References: The foregoing material is extracted from iBook 9, Calibration, of the 33 iBook Apple Bookstore series by Wayne Tustin on Dynamic Environmental Testing, used in Equipment Reliability Institute ERI on-site and open short courses, as well as in ERI distance learning.
